
RabbitMQ設定 (クラスタリング, ミラーリング)
RabbitMQでは環境変数・設定ファイル・ランタイムパラメタとポリシーの3つの経路で設定される。 以下の2つについては設定ファイルと相性が悪い。
- クラスタ内のノード全体で共有すべき事
- 実行時に動的に変化しがちな内容
これらの項目をRabbitMQではパラメターと呼びrabbitmqctlコマンドやmanagement pluginのHTTP API経由で操作する。
設定ファイル
- デフォルトの設定ファイルの場所はパッケージ種類で異なる
- 環境変数で設定ファイルの読み込み先を変更できる
- 設定ファイルと環境変数の項目はconfig.htmlを参考にする
- 特にストレージ・ネットワークについての推奨設定は別途まとまっている
- ネットワークについては関連するカーネルパラメタについても書かれている
分散構成の説明
RabbitMQを複数ノードで構成したい場合がある。方法は3通りあるようで紹介されている。 クラスタリング、フェデレーション、シャベルと呼ばれる。それぞれ違いは以下の様になっている。
クラスタリング
クラスタリングの主なモチベーションは高可用性・スループットの向上。
複数のノードが論理的に単一のbrokerを構成する。 クラスタ内の各ノードはErlangのメッセージパッシングで通信しており各ノードはErlangのバージョン・RabbitMQのメジャー・マイナーバージョン(X.Y.*)の一致が要求される。
vhost, exchange, user, permissionが全台にミラーリングされるがqueueは設定しない限り単一ノードに存在する。 ただしqueueの識別子は全ノードに公開されるためクライアントはどのノードに繋いでも問題は起きない。
フェデレーション
フェデレーションの主なモチベーションは広域なマルチキャスト(インターネットをまたぐPub/Sub)・複雑なルーティング・キューサイズのバランシング。
フェデレーションでは別ブローカー上のexchangeやqueueにpublishされたメッセージを受け取れるqueueやexchangeを使えるようにする。 フェデレーションの通信ではAMQP(with optional SSL)が利用される。
シャベル
シャベルはフェデレーションと同様のインターネットをまたいだキューイングで利用される。 しかしより詳細なコントロールが必要な場合に選ばれる。単純で他ブローカーからメッセージを消費し別のブローカーに再発行する事で実現される。
クラスタリングを試してみる
クラスタリング可能な条件
- Erlangのバージョン, RabbitMQのメジャー・マイナーバージョン(X.Y.*)が揃っている
- ErlangCookieが統一されている
- 互いのノードのドメイン名が解決できる
ErlangCookieが統一されている
cookieの位置は下にあり中身は任意の文字列となる。 クラスタを構成するErlangノードは互いの認証のために共通のCookieを持つ必要があるので事前に準備する必要がある。 特に設定せずに起動すると自動でランダムな文字列を含むCookieが作成される。
|
|
クラスタリングする方法
全部で4つあるrabbitmqctlコマンドで手作業、設定ファイルで定義する。 プラグインのサポートを得る方法が2つ(autocluster, clusterer)
コマンドで手作業してみる
はじめにrabbitmq-serverでサーバーを稼働させる。そのあとrabbitmqctlで設定をいじる。
同一ホストで稼働させる場合はポート番号に注意する。特にマネジメントプラグインが有効だと15672で衝突しやすい。
rabbitmq-server
はじめにrabbitmq-serverを使ってノードを立ち上げる。
|
|
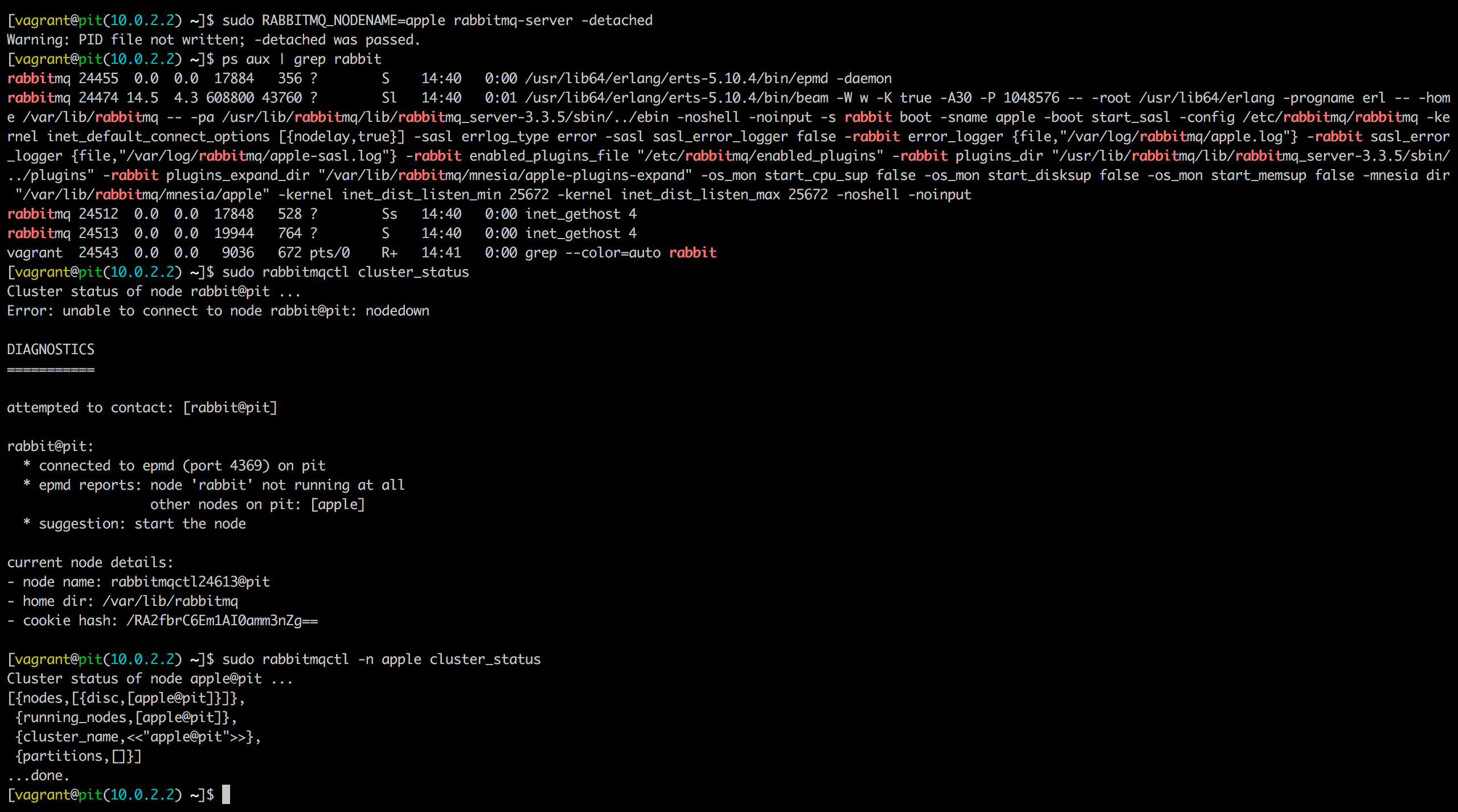
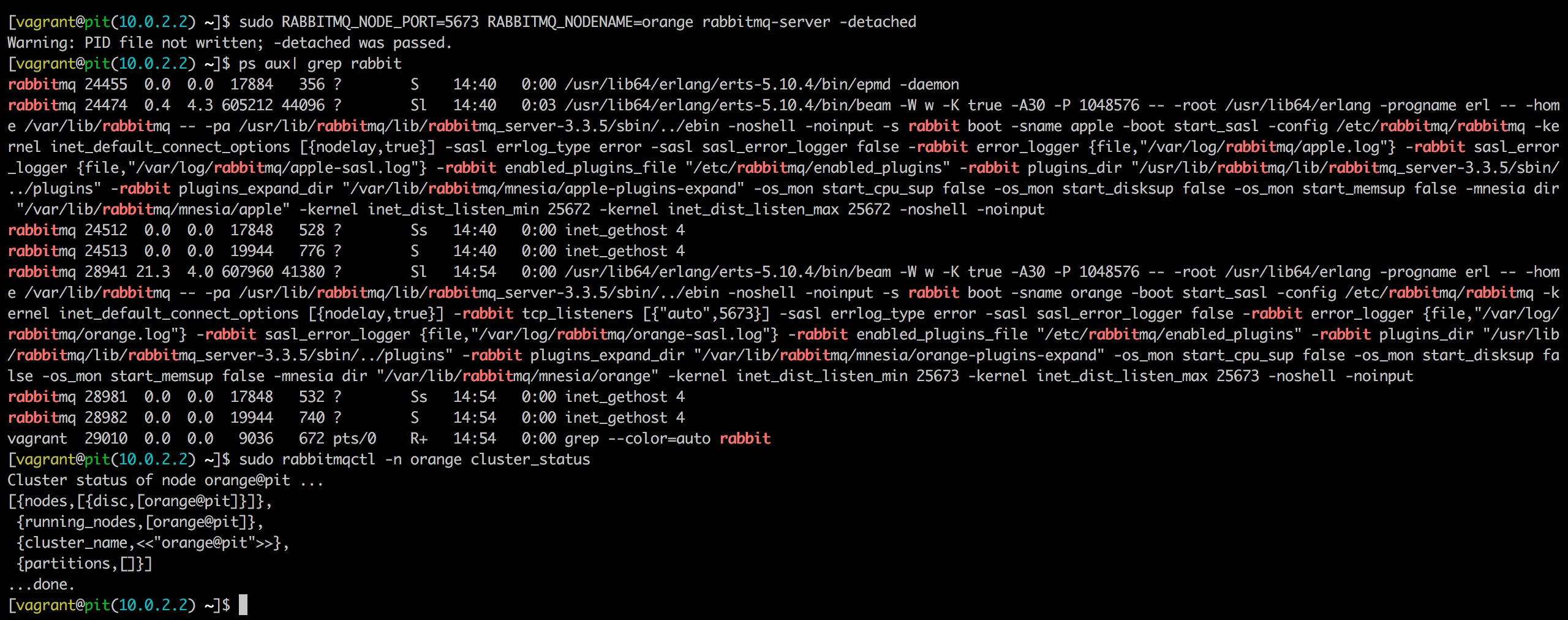
rabbitmqctl
rabbitmqctl は管理用コマンドで様々な操作を実行できる。-nオプションで実行対象のノード名を指定できる。
|
|
クラスタ操作サブコマンド(TODOサブコマンドって用語が正しいか?)
| サブコマンド | 用途 |
|---|---|
| join_cluster | 対象ノードと同一のクラスタに所属する |
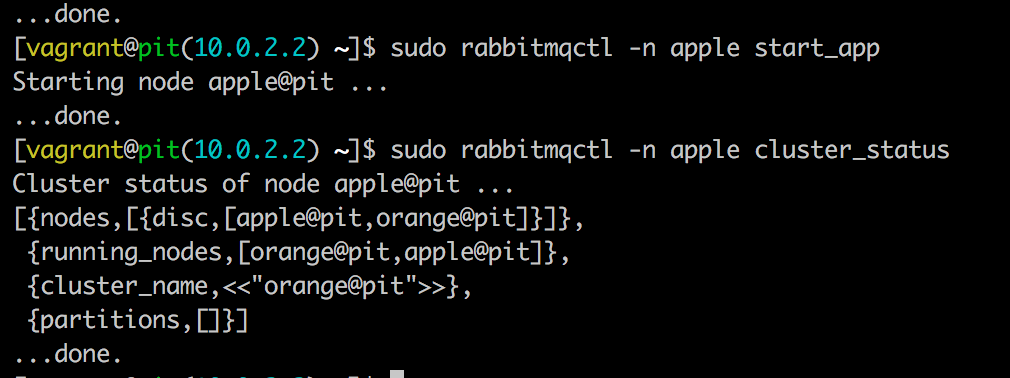
| cluster_status | 現在のクラスタステータスを確認する |
| reset | クラスタ情報を初期化する |
| forget_cluster_node | 対象ノード情報を削除する |
試してみた。
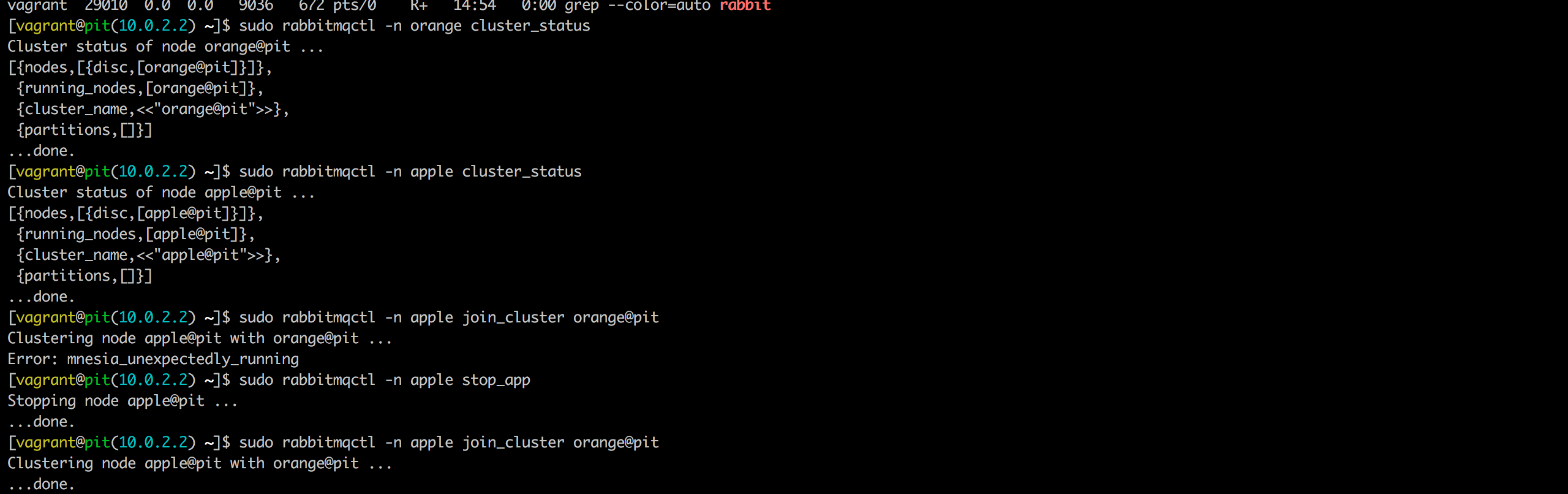
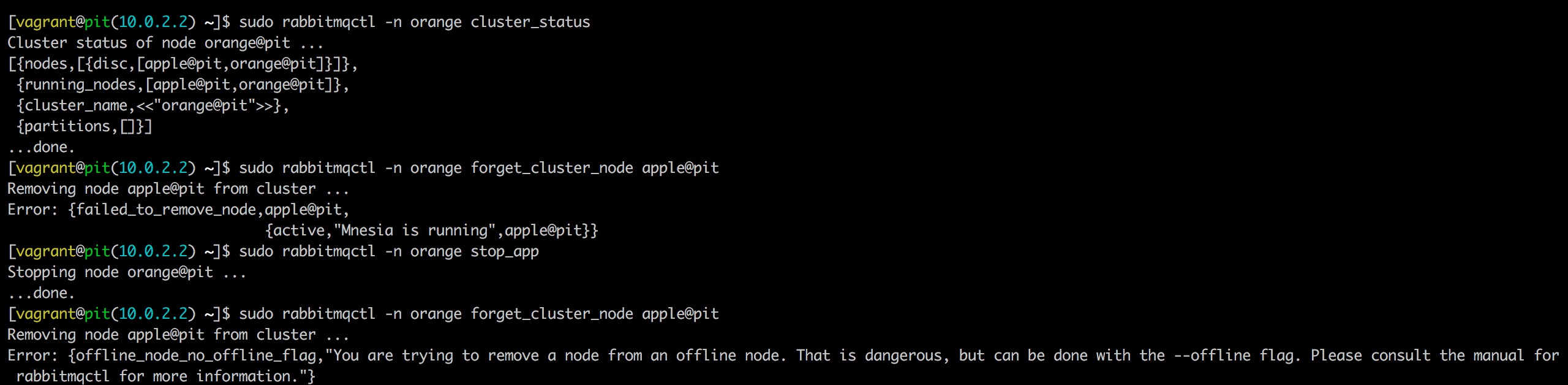
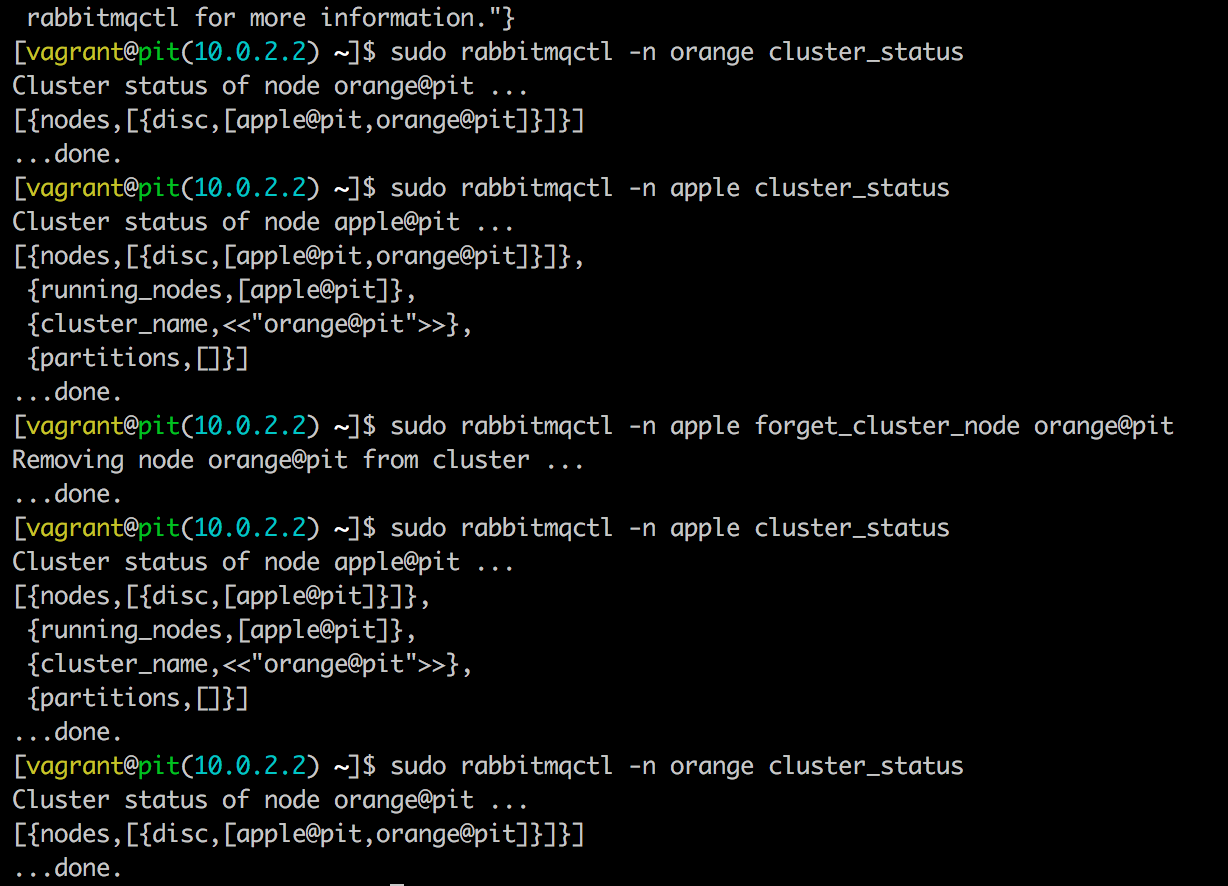
サブコマンドの実行条件は下の様になる。
| サブコマンド | 実行ノード(-nオプション) | 相手ノード(サブコマンド引数) |
|---|---|---|
| join_cluster | stop_app | start_app |
| reset | stop_app | start_app |
| forget_cluster_node | start_app | stop_app |
Disk or Ram
--ramオプションを使う事で対象ノード永続化をRAMにしてパフォーマンス向上を図る事が出来る。
RAMなのでDISKよりもデータの耐久性は落ちる。
|
|
設定ファイル
クラスタリングの設定項目は以下になる。
- cluster_nodes
-
join_cluster する対象ノード名一覧, nodeタイプ(disc, ram) のタプル
- cluster_partition_handling
-
可用性モードの設定(ネットワーク分断時の挙動選択)
- cluster_keepalive_interval
-
keepaliveメッセージを他ノードへ送る間隔[msec]
- net_ticktime
-
クラスタ内で互いの存在確認のメッセージ間隔[msec]
cluster_partition_handling
詳細はClustering and Network Partitions を見ておく。 ネットワーク障害時のハンドリングを4つの選択肢から選んで可用性/一貫性の具合を決められる。
- ignore
-
何もしない
- pause_minority
-
少数派パーティションが停止
- pause_if_all_down
-
指定ノードのどこにも辿り着けなくなったノードが停止 分断から回復する時の挙動にautoheal, ignore を選択できる
- autoheal
-
ネットワーク回復時に多数派を決定しそれ以外のノードを再起動
net_ticktime
詳細はnettickに記載されている。 Erlangのkernel_appが実際には関わっているらしい。
キューをミラーリングする
Highly Available QueuesでQueueのミラーリングについて書かれている。 キューをノード間でミラーリングするにはpolicyの設定が必要になる。 policyなのでパラメータして動的に指定する。
下みたいな感じで設定する。変数名で概要, デフォルト値でサンプル値を書いたので察して欲しい。
|
|